步进电机原理
电机将电能转化为机械能。步进电机将电脉冲转换为特定的旋转运动。
每个脉冲产生精确且可重复的运动,由此确保了步进电机在定位应用中的可靠性。
永磁式步进电机包含永磁转子、线圈绕组和磁导定子。如图1所示,给线圈绕组通电将产生一个南北极的电磁场。定子磁场载体,使转子与磁场对齐。通过有序地激励或“步进”定子线圈,可以改变磁场,从而产生旋转运动。
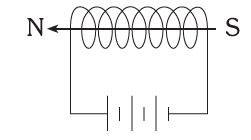
图1:通过激励线圈绕组产生的磁场
图2显示了两相电机的典型步进序列。在第1步中,为两相定子的A相通电。由于不同磁极相互吸引,这将转子锁定在所示位置。关闭A相,接通B相后,转子将顺时针旋转90°。在第3步中,断开B相,接通A相,但极性与步骤1中的相反。这会导致再次旋转90°。在第4步中,断开A相,接通B相,极性与步骤2中的相反。重复此序列,转子将以90°的步幅顺时针旋转。
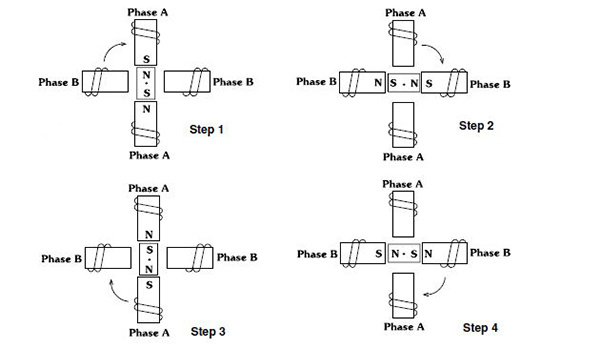
图2中所示的步进序列被称为“单相接通”步进。
更常见的步进方法是“两相接通”,其中电机的两相始终 处于通电状态。但一次只切换一个相的极性,如图3所示。在两相接通步进中,转子在北和南磁极之间自行对齐。由于两相始终处于接通状态,因此该方法可提供比“单相接通”步进高41.4%的转矩,但功率输入是其两倍。
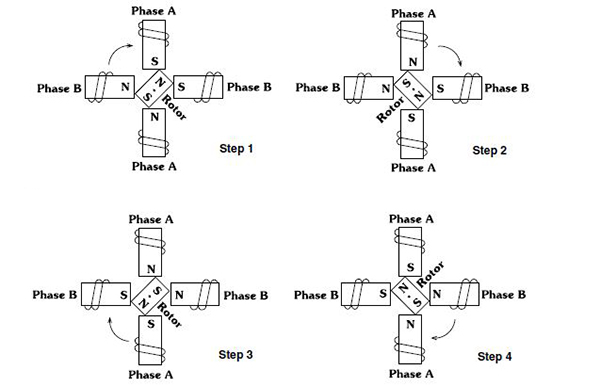
图3:两相电机的“两相接通”步进顺序。
半步进
通过在转换相之间插入关闭状态,电机也可以“半步进”。这将步进器的全步进角减半。例如,在图4中,90°步进电机每半步移动45°。然而,与两相接通步进序列相比,半步进通常会损失15%-30%的转矩,具体取决于步进速率。由于其中一个绕组在每个交替半步期间不通电,因此施加在转子上的电磁力较小,造成转矩的净损失。
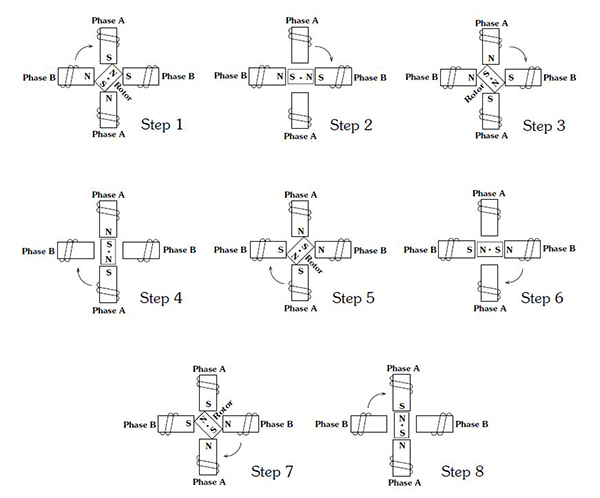
图4:半步进
双极性绕组
所描述的两相步进序列采用了“双极性线圈绕组”。每相由单个绕组组成。通过反转绕组中的电流,电磁极性也会反转。图5中的电气原理图和步进序列进一步说明了典型两相双极驱动器的输出级。如图所示,切换只改变通过绕组的电流流向,从而改变该相的极性。
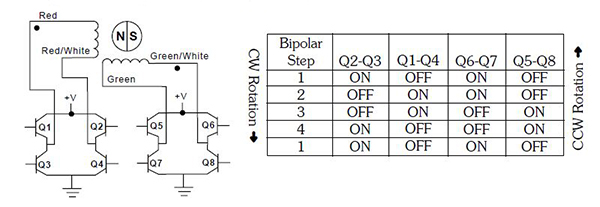
图5:双极绕组
单极绕组
另一种常见的绕组是单极性绕组。其一个极上有两个绕组。向一个绕组通电将产生一个磁北极,向另一个绕组通电将产生一个磁南极。因为从驱动器到线圈的电极性(即电流流向)不会改变,所以,它被称为单极绕组。步进序列如图6所示。这种设计适合更简单的电子驱动器。然而,与双极绕组相比,输出的扭矩大约减少了30%。因为通电线圈只使用了相对于双极线圈的一半,所以转矩较低。
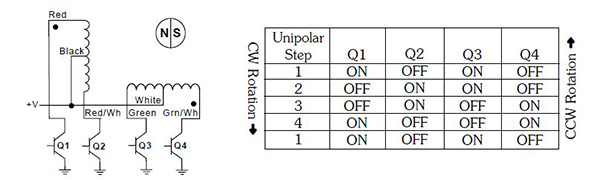
图6:单极绕组
其他步进角度
为了获得更小的步进角,转子和定子都需要更多的磁极。转子上的极对数量需与定子相同。7.5°步进角电机的转子有12个极对,每个极板有12个齿。每个线圈有两个极板,而每台电机有两个线圈;因此每台7.5°步进电机有48个磁极。图7为7.5°步进角电机4个极板的剖视图。当然,可以通过多步来实现更大的移动。例如,一台7.5°步进电机的六步可产生45°的运动。
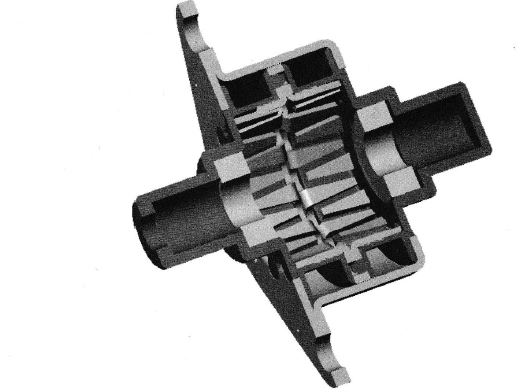
图7.局部剖开显示7.5°步进角电机的极板。
精度
永磁式电机的精度为每步6-7%,不累计。无论多少步,7.5°步进电机每步的精度都在理论位置的0.5°以内。增量误差不会累积,因为电机的机械设计决定了每次360°的完整旋转。极板的物理位置和转子的磁性模式通过每360°旋转(无负载条件下)就完全回到起始位置。
共振
步进电机由于弹簧质量系统电机而具有固有的共振频率。当步进速率等于电机的固有频率时,电机产生的噪音可能会发生明显的变化,振动也会增强。共振点随应用和负载而变化,但通常在每秒70至120步之间发生。在严重的情况下,电机可能会在共振频率处丢失步数。改变步进速率是避免系统中许多共振问题的最简单的方法。另外,半步或细分通常可以减少共振问题。加速时,应尽快通过共振区。
转矩
由特定旋转步进电机产生的转矩是以下项目的函数:
(直线步进电机产生的力也取决于这些因素。)
转矩是摩擦转矩(Tf)和惯性转矩(Ti)的总和。

摩擦扭矩(盎司-英寸或克-厘米)是用于移动负载所需的力(F)(单位为盎司或克)乘以用于驱动负载的杠杆臂的长度(r)(单位为英寸或厘米),如图8所示。
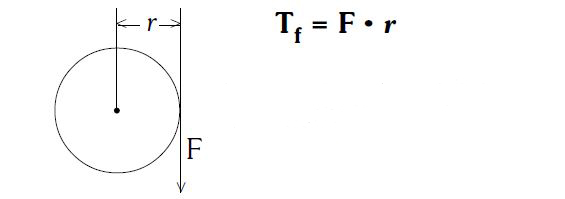
图8:摩擦力矩是移动负载所需的力(F)乘以杠杆臂的长度(r)。
惯性转矩(Ti)是加速负载所需的转矩(克-平方厘米)。
需要注意的是,随着电机步进速率的增加,电机的反电动势(EMF)(即产生的电压)也会增加。这限制了电流流动并会导致可用的输出转矩减小。
直线步进电机
步进电机的旋转运动可以通过多种机械手段转换为直线运动。这些包括齿条齿轮、皮带和皮带轮以及其他机械联动装置。所有这些方案都需要大量的外部机械组件。最有效方法是在电机自身内部完成这种转换。直线步进电机于1968年首次推出。图9显示了一些典型的直线步进电机。

图9:典型的线性执行器
直线步进电机内部从旋转到直线运动的转换通过螺母和螺杆来完成。转子内部带有螺纹,轴由螺杆代替。为了产生直线运动,必须防止螺杆旋转。转子转动时,内螺纹与螺杆啮合,从而产生直线运动。改变旋转方向会反转直线运动的方向。直线步进电机的基本结构如图10所示。
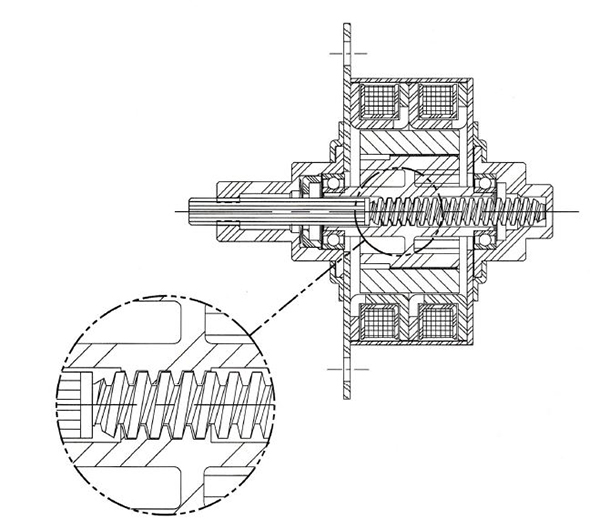
图10.直线步进电机的剖视图显示螺纹转子与螺杆的接口。
电机每步的直线行程由电机的旋转步进角度和转子螺母与螺杆组合的螺距决定。粗牙螺距比细牙螺丝每步有更大的行程。但是,对于给定的步进速率,细牙螺距螺杆可提供更大的推力。当电机未通电时,细牙螺距螺杆通常不能被手动“反向推动”或平移,但许多粗牙螺杆可以。转子和螺纹之间需要有少量间隙,以提供高效运行所需的移动自由。这导致0.001到0.003英寸的螺纹啮合(又称为间隙)。如果需要极高的定位精度,则应始终从同一方向接近最终位置,以补偿间隙。完成转子内从旋转到直线运动的转换,可大大简化了许多应用中获取直线运动的过程。由于直线步进电机为一体式设计,这大大降低或消除了对皮带和皮带轮等外部组件的使用需求。较少的组件使设计过程更加容易,降低了整体系统的成本,缩小了尺寸并提高了产品可靠性。
疲劳/寿命
在一些应用中,Haydon™品牌的线性执行器可提供高达2,000万次循环,Haydon旋转马达可提供长达25,000小时的使用寿命。电机疲劳和寿命最终取决于每位客户的独特应用。以下定义有助于理解电机的寿命和疲劳。
连续工作:在额定电压下运行电机。
25%的工作周期:在L/R驱动器上以双倍的额定电压运行电机。大约25%的时间电机都处于“运行”状态。电机产生的输出比额定电压时约高出60%。请注意,工作周期与电机负载无关。
寿命:直线步进电机的使用寿命是电机在规定负载下能够移动并保持步进精度的周期数。旋转电机的寿命是运行的小时数。
一个周期:线性执行器的周期包括伸出和缩回到原始位置的过程。
可以用一些通用准则来选择正确的电机和确保最大的使用寿命。最后,为了确定步进器在给定系统中的性能,最好在“现场条件”下或在接近这些条件的环境中执行最终装配测试。
由于步进电机无电刷磨损,其寿命通常远远大于系统中其他机械组件的寿命。如果步进器发生故障,这可能会影响某些组件。轴承和丝杠/螺母接口(直线步进电机)通常是发生疲劳的第一个组件。所需的转矩或推力和操作环境是影响这些电机组件的因素。
如果电机以额定转矩或推力或在额定转矩或推力附近运转,寿命将受到影响。海顿科克直线传动的测试表明,电机寿命将随操作负载的减少而成倍增加。一般来说,电机应被设计在一个设备中,以最大负载能力的40%至60%运行。环境因素,如高湿度、暴露于腐蚀性化学物质、过多污垢/碎屑和热量都会影响电机寿命。装配中的机械因素,如直线步进电机轴的侧面载荷或旋转应用中的不平衡载荷也会对使用寿命产生不利影响。
如果电机在工作周期减少的情况下使用,并有过高的电压施加到电机上,则在“运行”时间内必须保证不会超过电机的最大温升。如果电机没有得到足够的“休息”时间,则会产生过多的热量,进而导致绕组过热并最终发生故障。
设计一个可以最大限度地减少这些因素影响的系统可确保电机有最长的使用寿命。最大化使用寿命的第一步是选择安全系数为2或更大的电机。第二步是通过减少侧面载荷、不平衡载荷和冲击载荷来确保系统有良好的机械性能。系统还应散热。典型的散热方式是利用电机周围的空气流动或导热支架。如果系统中存在腐蚀性化学物质,则必须保护电机和所有其他组件。最后,在“现场条件”下测试电机和组件,确保它们适用于应用。
如果这些简单的准则得到遵守,那么海顿直线步进电机可在大多数应用中提供可靠的性能。如果您需要设计方面的帮助,